Código de Arduino para servomotor
Lista de materiales
- 1 microservo SG90
- 1 placa de Arduino uno
- 1 protoboard
- cables jumper
Conexiones de hardware
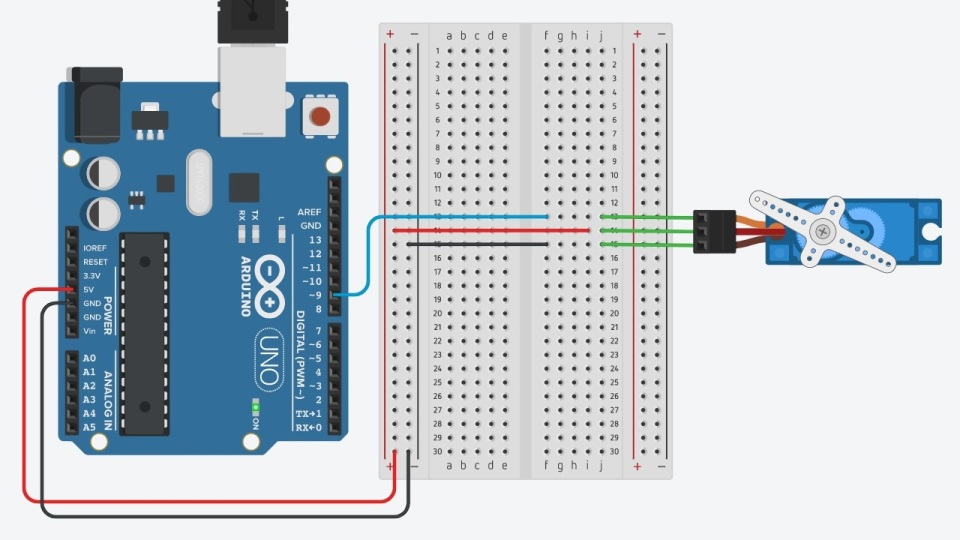
El servo tiene un cable conectado a él con tres hilos. Debido a que el cable termina en un enchufe, puede usar cables de puente para conectar entre el Arduino y el servo. Solo conecta el cables de puente directamente en el zócalo.
- Conecte el cable ROJO (alimentación) a 5 Voltios (5V)
- Conecte el cable NARANJA (señal) al pin digital 9
- Conecte el cable MARRON (tierra) a GND
Tenga en cuenta que los servos pueden usar mucha energía, lo que puede hacer que su Arduino para restablecerce se comporte de forma errática. Si está usando grandes servos o muchos de ellos, lo mejor es proporcionarles su propio suministro de 5V separado.
Estructura del programa o sketch
Este programa tiene por finalidad mover el eje del microservo de la siguiente manera:
- de 0 grados a 90 grados. Espera 1 segundo.
- de 90 grados a 180 grados. Espera 1 segundo
- se pone en posición de 0 grados y espera un segundo
- avanza de 0 grados a 180 grados lentamente
- regresa de 180 grados a 0 grados lentamente.
Luego se repite indefinidamente.
----------------------------------------------
#include <Servo.h>
Servo servo1;
void setup()
{
servo1.attach(9);
}
void loop()
{
int numero;
servo1.write(90);
delay(1000);
servo1.write(180);
delay(1000);
servo1.write(0);
delay(1000);
for(numero = 0; numero < 180; numero += 1)
{
servo1.write(numero);
delay(20);
}
for(numero = 180; numero >= 0; numero -= 1)
{
servo1.write(numero);
delay(20);
}
}
------------------------------------------------------

¿Qué es un servo?
Los servomotores o simplemente "servos", son motores DC con engranajes que limitan la velocidad pero aumentan el torque, incorporan además una circuitería de control para poder establecer la posición del eje del motor de forma precisa. Es decir, su eje no gira libremente (como lo hace el de los motores DC) sino que rota un determinado ángulo, indicado a través de una señal de control. Lo que hace especial a un servo es, por tanto, que podemos ordenarle que gire una cantidad de grados concreta, cantidad que dependerá de la señal de control enviada en un momento dado por un microcontrolador programado por nosotros. Los servos son muy comunes en dispositivos mecánicos pequeños (como por ejemplo el control de la dirección de un auto teledirigido), pero también sirven para gestionar el movimiento de puertas, brazos robóticos, piernas, etc.
Los servomotores disponen normalmente de tres cables, uno para recibir la alimentación eléctrica (normalmente de color rojo), otro para conectarse a tierra (normalmente de color negro o marrón, según el fabricante) y otro (el cable de control, normalmente de color blanco, amarillo o naranja) que sirve para transmitir al servo, de parte del microcontrolador, los pulsos eléctricos que ordenarán el giro concreto de su eje. El cable de alimentación ha de conectarse a una fuente que pueda proporcionar 5 V y al menos 1 A. El cable de tierra ha de conectarse lógicamente a la tierra común del circuito. El cable de control debe conectarse a algún pin digital de la placa Arduino, por el cual se enviarán los pulsos que controlarán el desplazamiento angular del eje. A diferencia de los demás motores DC, para cambiar el sentido de giro del eje de los servos no es necesario invertir la polaridad de su alimentación.
Contenido
Recomendados:

Un día como hoy 27/06/2026
Bill Gates abandona sus labores frente de Microsoft cediendo el control de la empresa a Steve Ballmer.

Peso Ideal según la altura
Escribe tu altura en metros y podrás conocer tu peso ideal. Además puedes obtener el margen mínimo y máximo.